CGV Lab
Computer Graphics and Vision Lab @ Handong Global University.
About
The CGV Lab at Handong Global University develops intelligent systems to perceive and reconstruct the real world. Our research focuses on achieving reliable indoor autonomous driving through advanced perception and neural rendering technologies.
Mission
- Pioneer 3D perception and neural rendering for immersive digital twins.
- Enable high-precision indoor autonomous driving for mobile platforms.
- Bridge research and practice through open-source and real-world deployment.
Research Areas
- Neural Rendering (NeRF, Gaussian Splatting)
- Indoor Autonomous Driving (Localization, Control, Navigation)
- Intelligent Perception (Scene Understanding, 3D Reconstruction)
- Spatial Analysis (Optimization, Geometric Vision)
News
| Jan 01, 2026 | 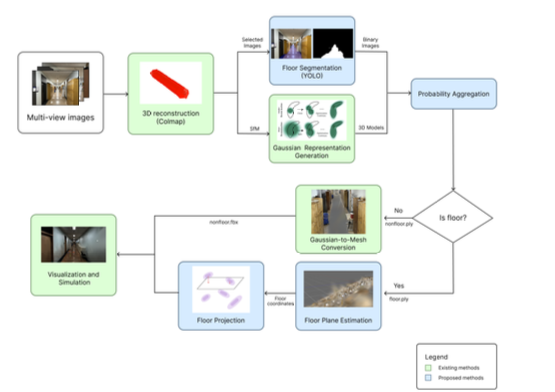 [IEEE AIxVR 2026] 1 PAPER ACCEPTED(2026.1) Sim, Seonghwan and Kim, Yeji and Hwang, Sung Soo, “Stabilizing Robot Simulation via YOLO-based Floor Flattening and Selective Mesh Reconstruction in 3D Gaussian Splatting.” |
|---|---|
| Jan 15, 2025 | 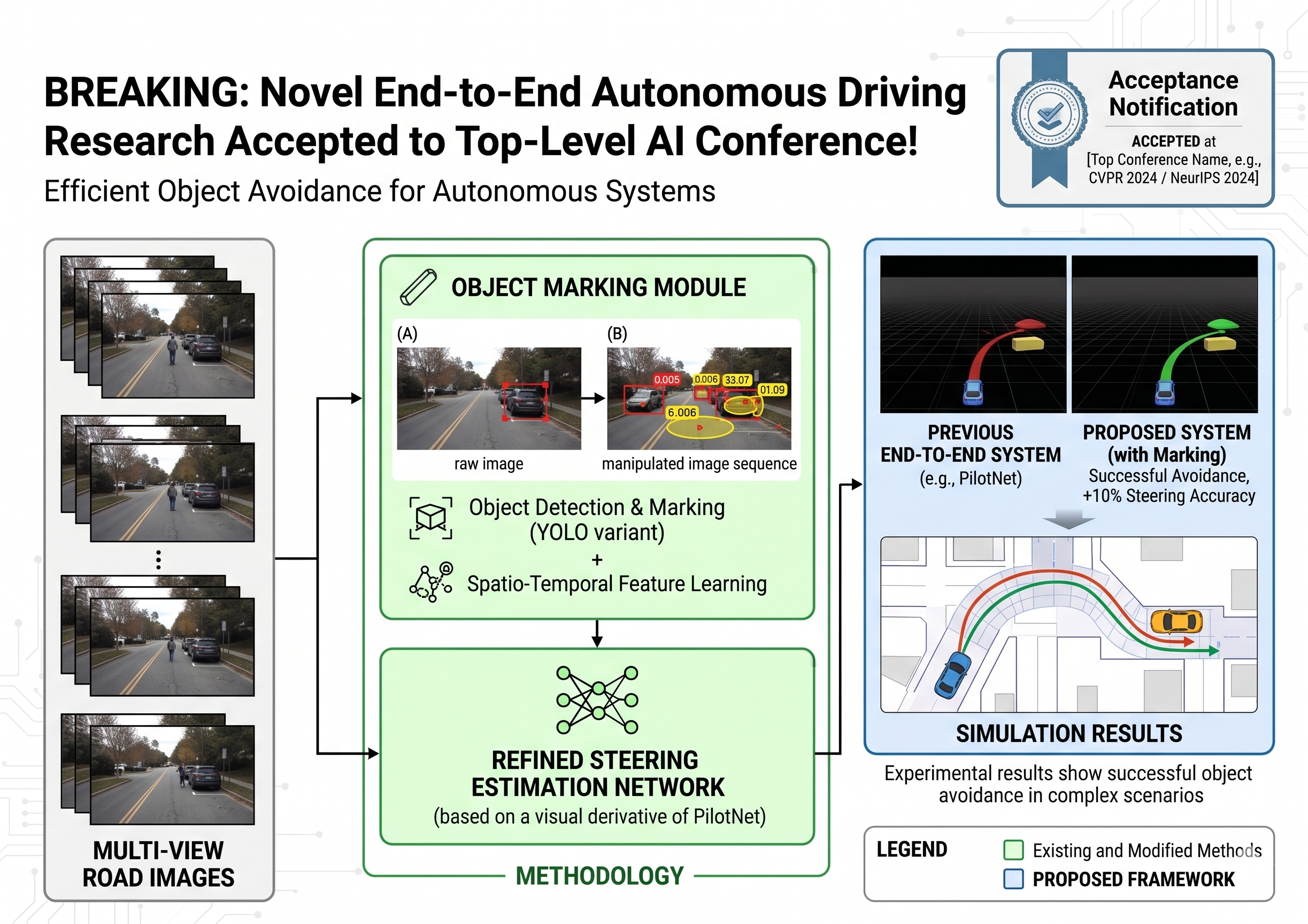 [IJAT 2025] 1 PAPER PUBLISHED Younggon Jo, Jeongmok Ha, and Sungsoo Hwang, “Embedding Object Avoidance to End-To-End Driving Systems by Input Data Manipulation”, International Journal of Automotive Technology |
| Jul 20, 2024 |  [Neural Processing Letters 2024(IF: 2.6)] |
| Nov 01, 2023 |  [IJAT 2023(IF: 1.5)] 1 PAPER ACCEPTED(2023.11) Younggon Jo, Jeongmok Ha and Sungsoo Hwang, “SURVEY OF TECHNOLOGY IN AUTONOMOUS VALET PARKING SYSTEM”, International Journal of Automotive Technology |
| Mar 01, 2023 |  [T-ITS 2023(IF: 7.9)] |